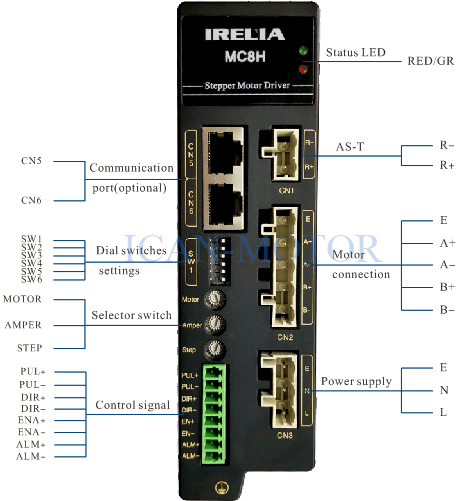
MC8H Stepper Motor Driver
")


Features:
High voltage Nema 42 stepper motor driver
8.0A, 85-265VAC
Support PUL/DIR and CW/CCW modes
Low noise, low vibration
Advanced DSP-based current control(0.5-8.0A) matches nema17-nema41
Easy setup via DIP switches for micro-stepping resolution(16)
We can offer stepper driver from 0.3A- 8.0A. Customization is also available.