BLD-300R DC brushless motor driver is a high-performance,low-cost suitable brushless driver for 69W to 300W low voltage DC brushless motor, which is independently developed by ICAN Technology Co., Ltd. BLD-300R support the Modbus communication protocol, providing users with more flexible options for applications.
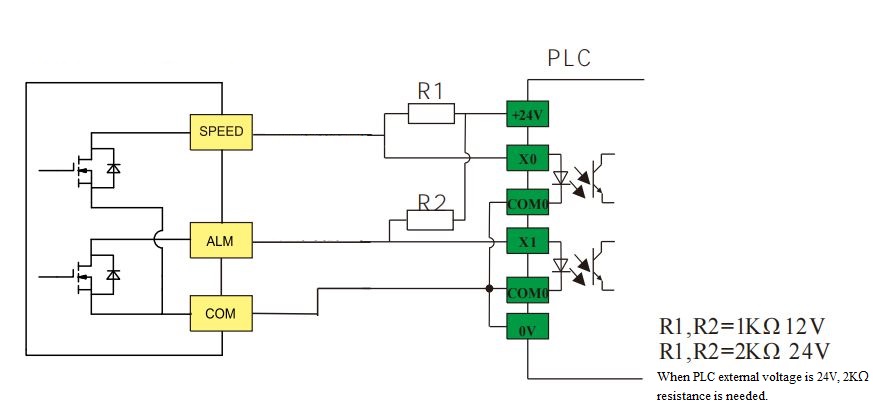
The internal structure of ALM and SPEED of this drive is as follows, which is related to the PLC wiring and the type of PLC input. For example, input modules such as AX40/741/42/50/60 of Mitsubishi A series PLC and QX40/41/42 of Q series only support source mode, and users should connect according to the characteristics of this input type.
Output interface circuit of brushless driver
Speed regulation
BLD-300R has 4 speed regulation ways as following:
1. Via built-in potentiometer
Motor speed is increase when RV knobs is rotated clockwise, when anticlockwise, motor speed decreases. If user use other speed modes, RV should be rotated anticlockwise to limit position.
2. Via external potentiometer
Use a suitable potentiometer with a resistance value of 10kΩ; When connect external potentiometer, the middle terminal connects to SV, the other two terminals connect to +5V and GND
① RV should be rotated anticlockwise to limit position.
② Notice the connection sequence of the potentiometer.
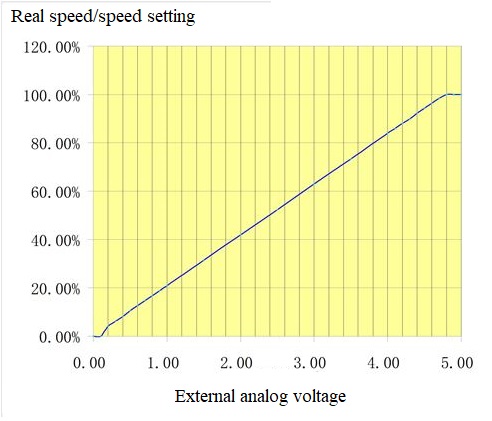
3.Via external analog signal 0-5V
When use external analog signal, the built-in potentiometer RV must be OFF (RV should be rotated anticlockwise to limit position).
External analog speed control linearity test curve:
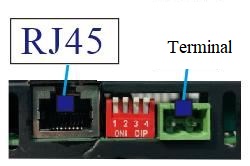
4.RS485
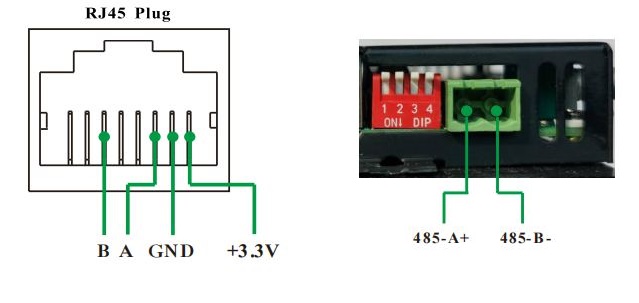
This drive has 2 kinds of interfaces for rs485 communication wiring, one is RJ45, the other is pluggable terminal
The “2-wire” electrical interface in EIA / tia-485 standard is adopted in the BLD300R. RJ45 interface has A、B、 GND pin. Take the Section 7.3.2 in GB / T 19582.2-2008 for detail reference. The pluggable terminalis is just for users to debug programe. Considering the industry practice, there’s 3.3V voltage on the RJ45Plug, Users can decide whether to connect 3.3V or not according to the actual situation.
Function setting
1 Start and stop
When EN and COM terminal are connected, the motor runs.Otherwise, the motor stops slowly.
By connecting a switch between COM and EN or using, PLC can control the motor start and stop.
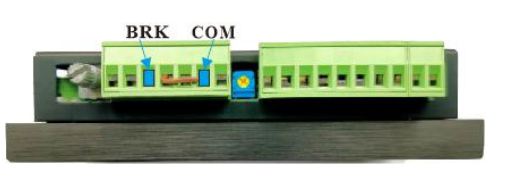
2 Brake
When connecting the BRK and COM, the motor stops quickly. Otherwise, the motor runs.
By connecting a switch between COM and BRK or using PLC could control run and rapid stop.
The difference between EN and BRK:
EN control is natural stop; BRK control is rapid stop. For example, it takes 592ms for the motor to completely stop after EN is disconnected, and it only takes 12ms after BRK is connected.
3 Direction control
F/R and COM disconnect in default, when power is on,motor will start to run CW.
F/R and COM disconnect, motor runs clockwise.
4 Closed loop work
The driver always runs in the speed closed loop state.
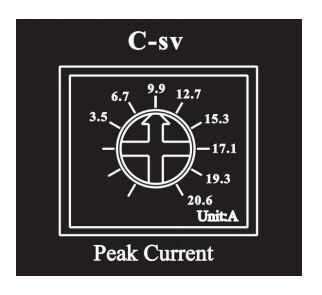
5 Current limit value adjustment
Current limit value adjustment(C-sv) is to limit the peak value of the motor phase current. When the load suddenly increases. The output current will be limited to the set value to reduce the motor speed and protect the motor not damaged. The setting range is 3.5 ~20.6A.
Please set the peak current according to the scale in the right figure.Since the error between the set peak output current and the actual peak output current is
about ±10%. For safety, please appropriately reduce the peak output current.
5.6 Stalling torque holding
When the load suddenly rises or hits an obstacle, the output current of the motor is limited to the set value of the current-limiting potentiometer to protect the motor and the driver. Due to the effective holding force, the force drop and unreasonable collision are prevented. If the reason for the restriction of the rotor is solved within 10 seconds, the motor can rotate again. If not, the motor will stop and report 8 alarms, and should reset the motor (User cannot be restarted by removing obstacles alone).