1 Start and stop
When EN and COM terminal are connected, the motor runs.Otherwise, the motor stops slowly.
By connecting a switch between COM and EN or using, PLC can control the motor start and stop.

2 Brake
When connecting the BRK and COM, the motor stops quickly. Otherwise, the motor runs.
By connecting a switch between COM and BRK or using PLC could control run and rapid stop.
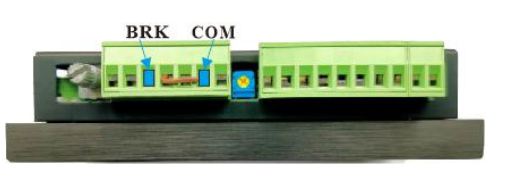
The difference between EN and BRK:
EN control is natural stop; BRK control is rapid stop. For example, it takes 592ms for the motor to completely stop after EN is disconnected, and it only takes 12ms after BRK is connected.
3 Direction control
F/R and COM disconnect in default, when power is on,motor will start to run CW.
F/R and COM disconnect, motor runs clockwise.

4 Closed loop work
The driver always runs in the speed closed loop state.
5 Current limit value adjustment
Current limit value adjustment(C-sv) is to limit the peak value of the motor phase current. When the load suddenly increases. The output current will be limited to the set value to reduce the motor speed and protect the motor not damaged. The setting range is 3.5 ~20.6A.
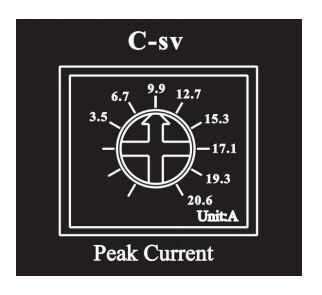
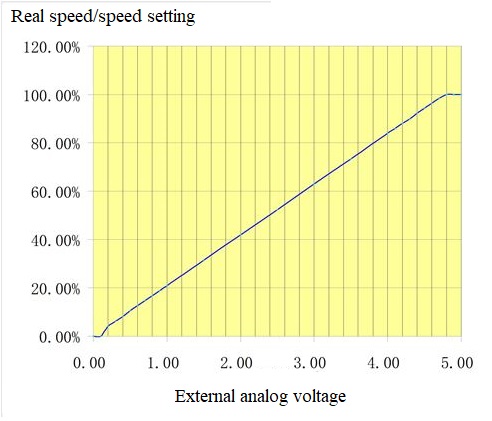
Please set the peak current according to the scale in the right figure.Since the error between the set peak output current and the actual peak output current is
about ±10%. For safety, please appropriately reduce the peak output current.
5.6 Stalling torque holding
When the load suddenly rises or hits an obstacle, the output current of the motor is limited to the set value of the current-limiting potentiometer to protect the motor and the driver. Due to the effective holding force, the force drop and unreasonable collision are prevented. If the reason for the restriction of the rotor is solved within 10 seconds, the motor can rotate again. If not, the motor will stop and report 8 alarms, and should reset the motor (User cannot be restarted by removing obstacles alone).