BLDH1500RA is designed by ICAN-Tech with high-performance and low-cost which used for high voltage brushless DC motors less 1500W. It supports Modbus communication protocol, and also provides more flexible choices for users in actual practice.
Electrical parameters
Driver parameter
Min.
Rated value
Max.
Input voltage AC (V)
100
220
250
Phase Current Peak (A)
–
–
13
Motor rotate speed (rpm)
100①
–
–
① Under closed loop, the minimum speed of the motor is 100 only if the pole number is set on the driver correctly.
Environmental indicators
Environment factors
Environment indicators
Heat Sinking Method
Natural cooling or fan-forced cooling
Atmosphere
Avoid dust, oily mist and corrosive air
Operating Temperature
-25°C~+50°C
Storage Temperature
-30°C~+70°C
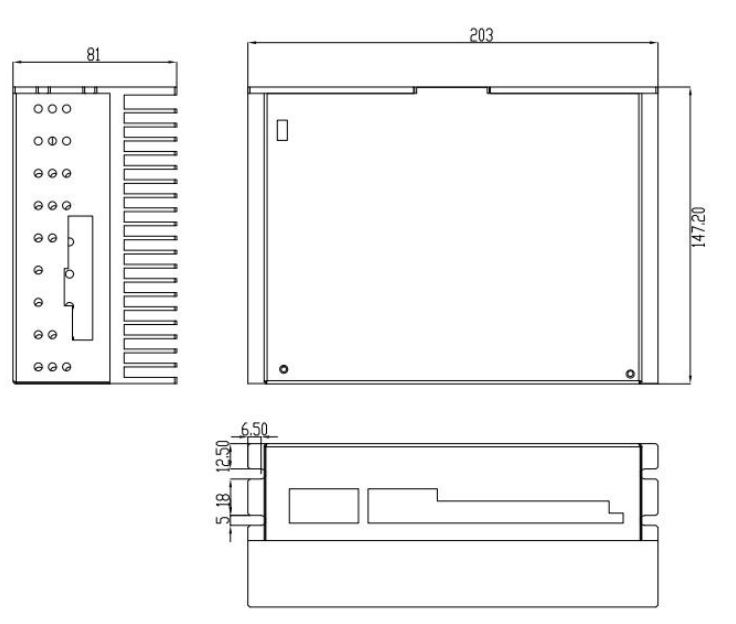
Bldc driver dimension
Interface and Wiring
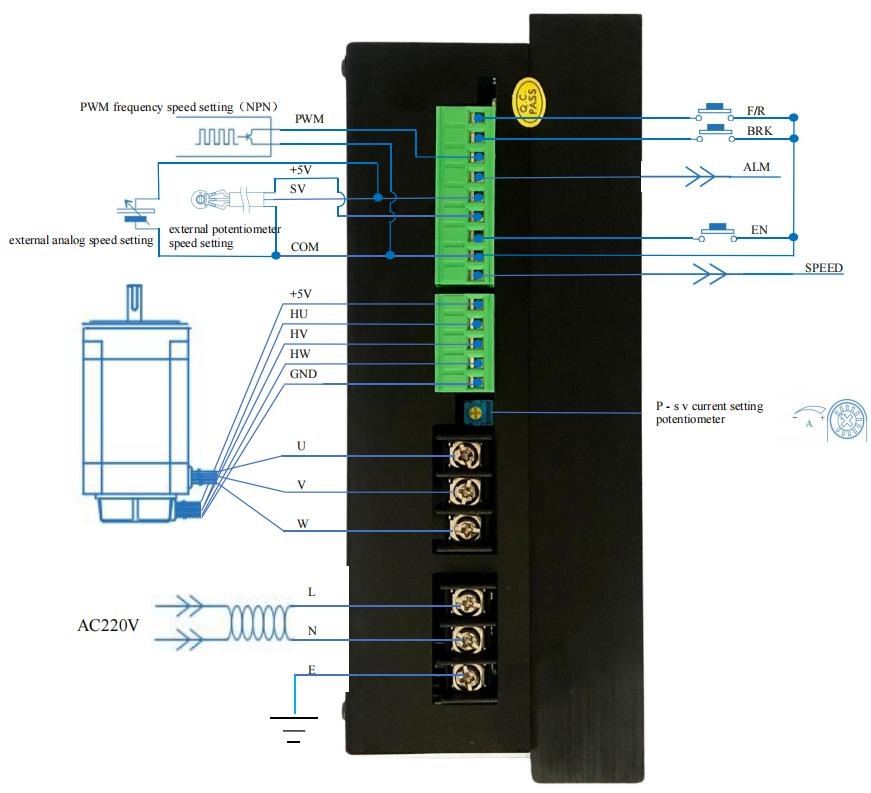
Bldc motor driver circuit diagram
Port signal description
Signal category
Terminal
Functional Description
Power supply input
E
AC Power supply ground electrode
L
AC Power supply input
N
AC Power supply input
Motor connector
U
Motor line U phase
V
Motor line V phase
W
Motor line W phase
Hall signal connector
GND
Hall signal ground electrode
HW
Hall sensor signal HW
HV
Hall sensor signal HV
HU
Hall sensor signal HU
+5V
Hall sensor signal power supply+
Control signal connector
SPEED
Rotate speed output in form of frequency
COM
Common port
EN
Stop signal terminal;
EN and COM connect, motor runs;
EN and COM disconnect, motor stops.
+5V
5V power supply
SV
1 2
External potentiometer speed setting input;
External analog signal input, 0 ~ 5V input.
ALM
Fault output, refer to 6.3
Normal : high level
Fault : low level
PWM / F
PWM or pulse frequency speed setting input terminal (chosen by SW4).
The largest input voltage is 5VDC.
BRK
Motor brake stop signal;
BRK and COM disconnect, motor runs;
BRK and COM connect, motor stops and then braking.
F/R
Motor direction control terminal;
F/R and COM disconnect, motor rotates clockwise; F/R and COM connect, motor rotates anticlockwise.
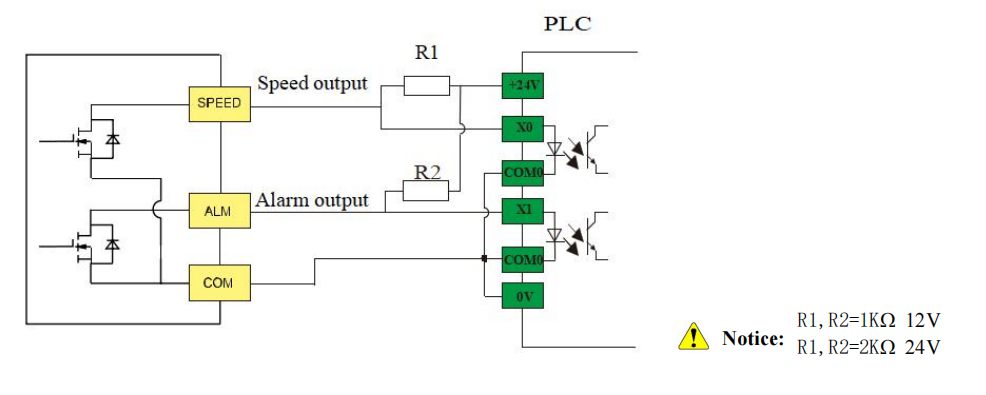
Output signal connection diagram
The internal structure of ALM and SPEED ports is following as below, the connection with PLC depends on the input terminal type. For example, if the PLC input module AX40/741/42/50/60 and QX40/41/42 of Mitsubishi only support Sourcing Input, users should connect according to the characteristics of this input type.
Speed regulation
BldH-1500R have speed control methods as following.
1 Via built-in potentiometer
Motor speed is changed when RV knobs is rotated , when anticlockwise, motor speed decreases. If user use other speed modes, RV should be rotated anticlockwise to limit position.
2 Via external potentiometer
Use a suitable potentiometer with a resistance value of 10kΩ; When connect external potentiometer, the middle terminal connects to SV, the other two terminals connect to +5V and GND
① RV should be rotated anticlockwise to limit position.
② Notice the connection sequence of the potentiometer.
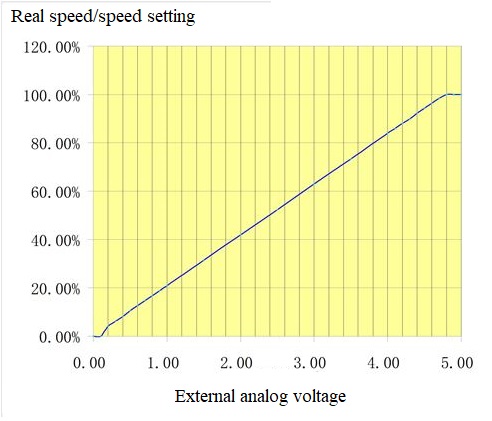
3 Via external analog signal 0-5V
When use external analog signal, the built-in potentiometer RV must be OFF (RV should be rotated anticlockwise to limit position).
External analog speed control linearity test curve as below
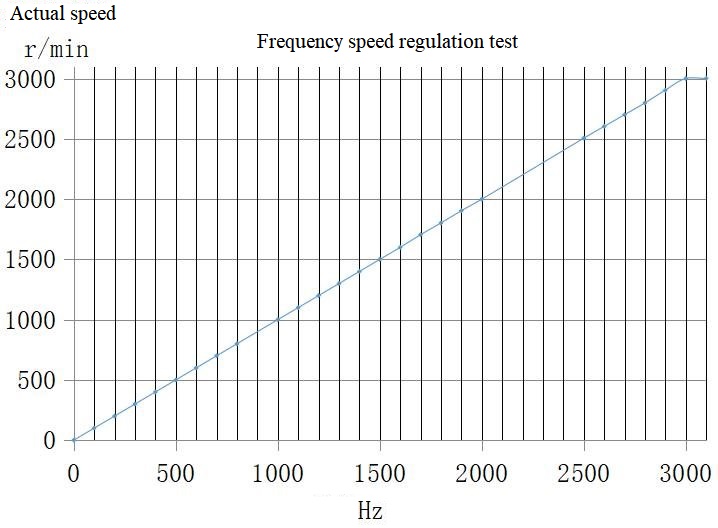
4 Speed setting via pulse frequency
the motor speed is changed as the variation of pulse of frequency.
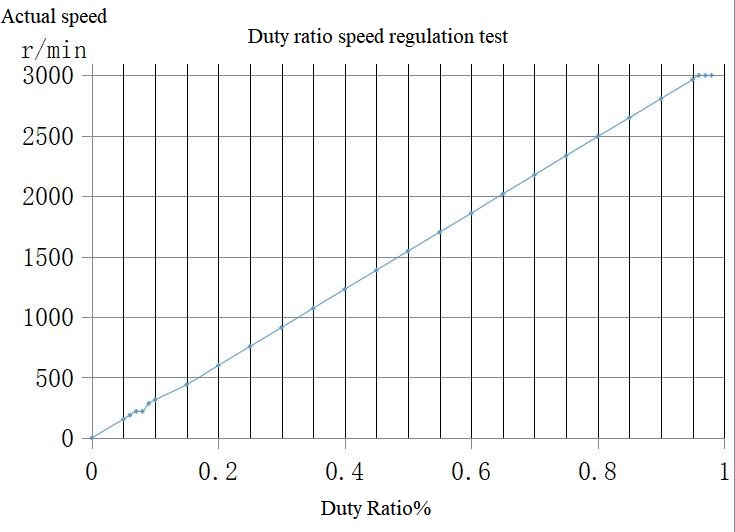
5 BLDC PWM control
PWM signal is recommended low level 0V to high level 5V, frequency 3kHz (recommended range 3K ~ 15K Hz). The recommended speed range is duty ratio 5%-96%. The following is a measured example.
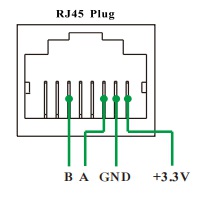
6 Communication signal RS485
The communication function of the driver adopts Modbus protocol and conforms to the national standard GB / T 19582.1-2008. The two-wire serial link communication based on RS485 is used. The physical interface adopts RJ45. Three wires need to be connected:,B, A and GND (wiring is prohibited for other terminals in this RJ45 interface). The communication address is set through communication. The 120 Ω terminal matches the resistance and needs to be externally connected by the user.
Packing and delivery time
Related Products
Optical axis motor
high voltage 110-220VAC bldc motor, less than 1500w.