
Closed-loop stepper motor nema 17
Nema 17 encoder specifications
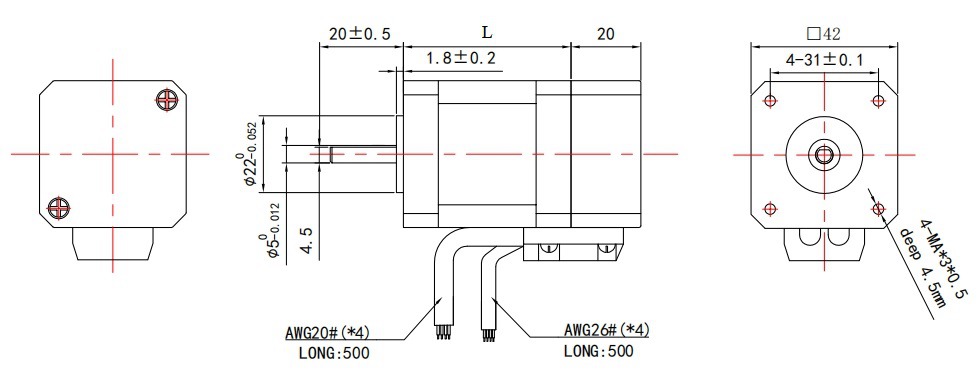
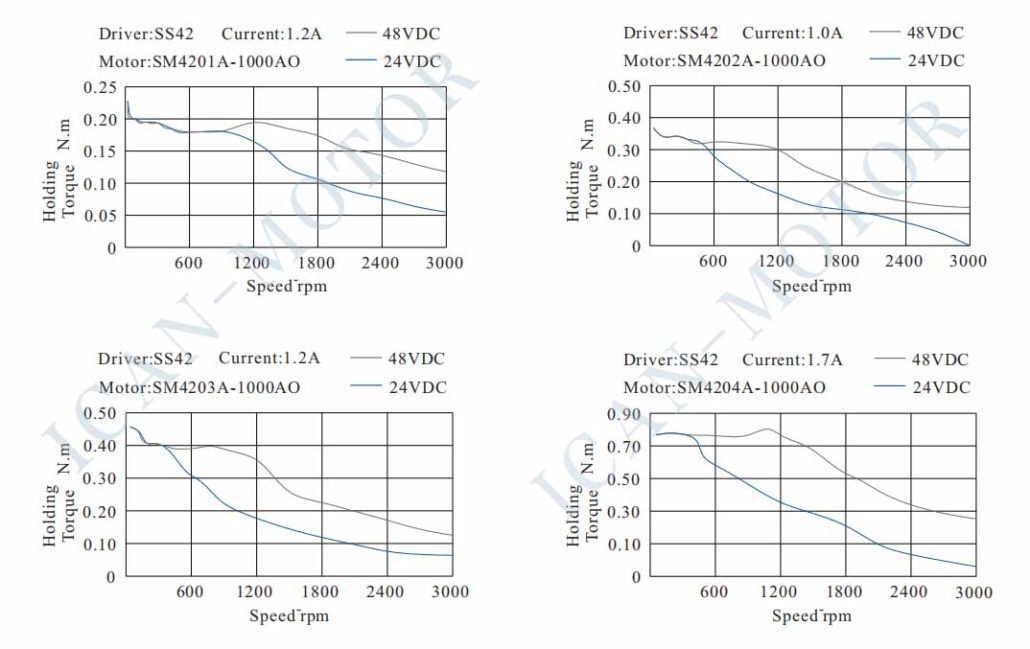
| Flange size | Models | Phase | Holding Torque(Nm) | Current phase(A) | Phase inductance (Mh) | Resistance (Ω) | Motor length(Mh) | Matched driver | Drawings Download |
|---|---|---|---|---|---|---|---|---|---|
| Nema17(42*42mm) | SM4201A-1000AO | 2 | 0.25 | 1.2 | 4.8 | 3.2 | 54 | SS42 | |
| SM4202A-1000AO | 2 | 0.35 | 1.0 | 9 | 5.7 | 60 | SS42 | ||
| SM4203A-1000AO | 2 | 0.46 | 1.2 | 6 | 3.5 | 68 | SS42 | ||
| SM4204A-1000AO | 2 | 0.75 | 1.7 | 5 | 2.5 | 80 | SS42 |
We have closed loop stepper motor from nema 17-nema23. We can also offer motor customization. Contact us for more details.
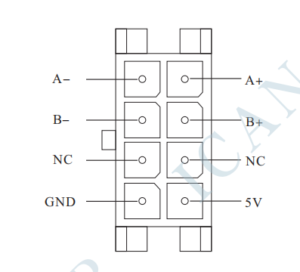
Closed loop stepper motor nema 17 port description
The motor has two cables, the motor cable&encoder cable:
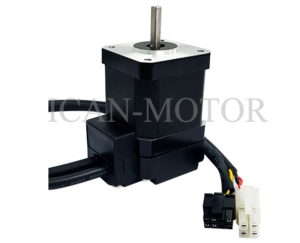
Motor port:
A+/- is motor phase A+/-; B+/- is motor phase B+/-

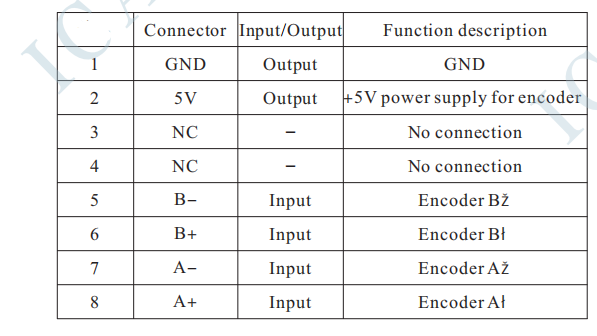
Encoder port:
A+/- is encoder phase A+/-; B+/- is encoder phase B+/-
Torque curve
Industry-leading algorithm
The SS42 closed loop nema 17 motor driver uses a high-characteristic 
photoelectric encoder to feedback the position to the Cotex-M4 ARM
core processor. The position is adjusted in real-time every 50us, and
it can respond quickly to position commands. The position response
speed is better than that of various types that have appeared on the
market for many years. It can make the equipment have higher processing
accuracy, higher-finish, and more perfect product details.
Automatic current adjustment
The SS42 closed-loop stepper motor driver can automatically adjust 
the step length and automatically adjust the current according to the
load. Under low load conditions, the current is automatically adjusted
to the lowest level, thereby reducing motor noise and heat. When the
load is suddenly increased, the current is fast and real-time Adjust to
the optimal value to maintain high-precision position control and
high-speed operation without losing a step.
The motor stops stably without any shaking
The SS42 closed-loop stepper motor driver continuously feedbacks 
through the encoder to detect the difference between the reference
position and the actual position. When the closed-loop stepper motor
reaches the target position, it stops stably without any vibration and
becomes the series of SS hybrid servo motors (closed-loop step Into
the motor) is one of the biggest advantages different from the
traditional servo motor.
No need for parameter tuning design
The closed-loop stepper motor driver is simple to use and
doesn’t require parameter settings. The traditional servo position
PID algorithm needs to adjust the control parameters according
to the load to produce the best control effect. The tuning process
is complicated. The SS42 closed-loop stepper motor driver realizes
the fast positioning of the closed-loop stepper motor through precise
step adjustment technology, almost no need Tuning the control
parameters of the position loop avoid the trouble of parameter
setting adjustments during customer use.
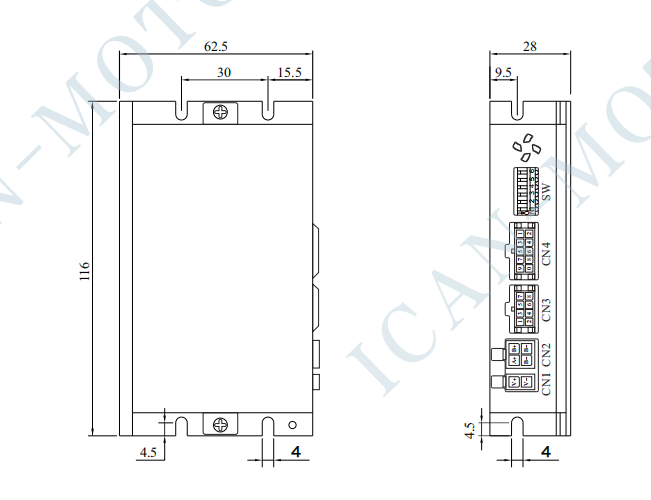
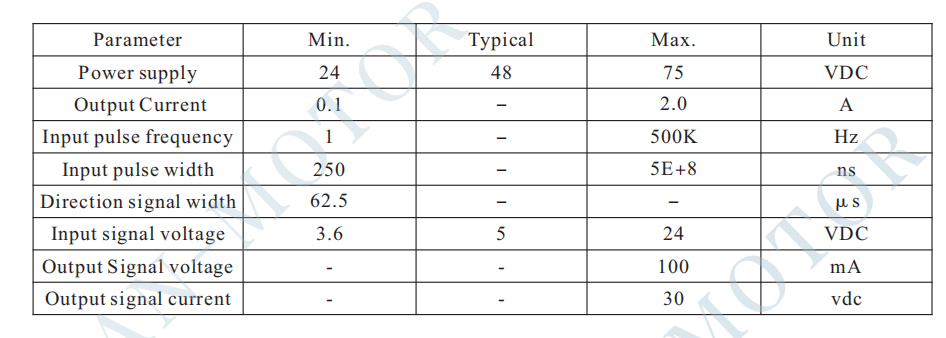
Electrical Specifications
Drive interface and wiring diagram
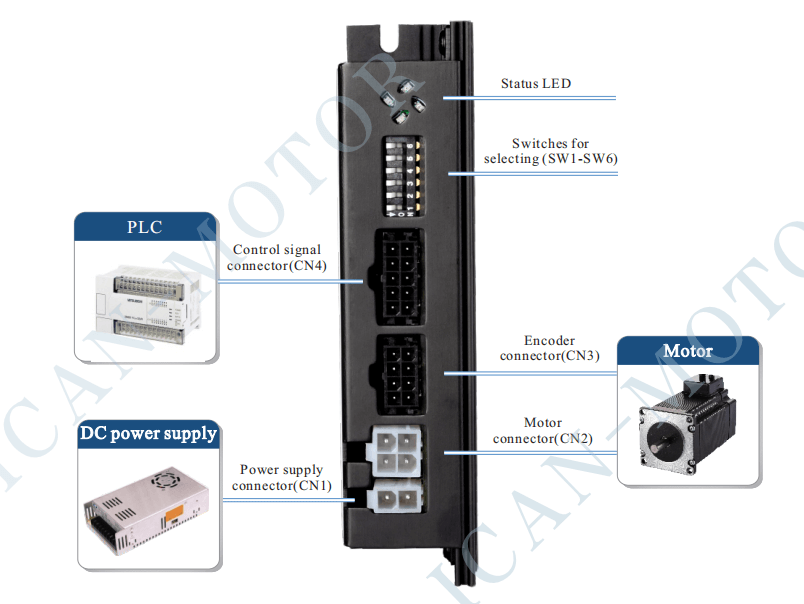
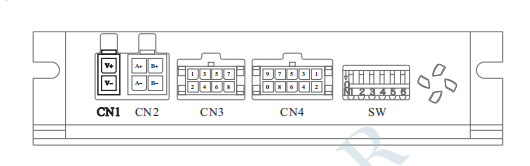
CN1: Power supply connector. The power supply is 24VDC-75VDC.
CN2: Motor connector
CN3: Encoder connector. The feedback signal from the encoder of the closed-loop stepper motor will be put into A+, A-, B+, B-.
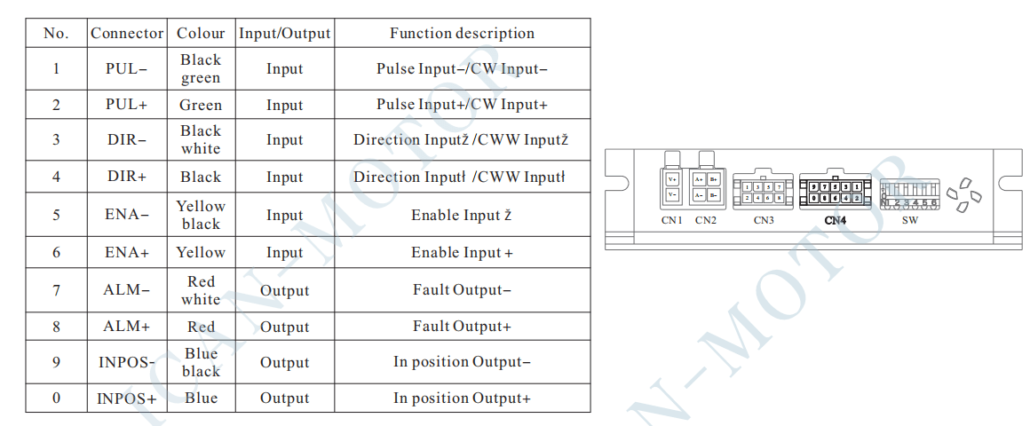
CN4: Control signal connector: the pulse, direction, enable signal input.
SW1-SW4: Micro stepping setting
SW5: Initial direction selection
SW6: Single/double pulse matching


