BLD1500RA brush less DC motor driver is independently developed by Dongguan ICAN Technology Co., Ltd. It is a high-performance and low-cost brushless driver for 1500W low-voltage brushless DC motor. The DC brushless driver supports Modbus communication protocol and motor deceleration braking function, providing users with more flexible choices in practical applications.
Electrical parameters
Driver parameter
Min Value
Typical Value
Max value
Unit
Current input (A)
–
40
–
A
Voltage input
DC(V)
20
48
50
V
Current limit(A)
22
–
82
A
Output Power(W)
–
1500
1500
W
Apply speed
–
3000
–
rpm
The parameters of this table are suitable for normal temperature 25 °C
Environmental indicators
Heat sinking Method
Natural cooling or fan-forced cooling
Used occasion
Avoid dust,oily mist and corrosive air
Operating Temperature
-20C~+40C
Storage Temperature
-30C~+50C
Dielectric Strength
500VAC
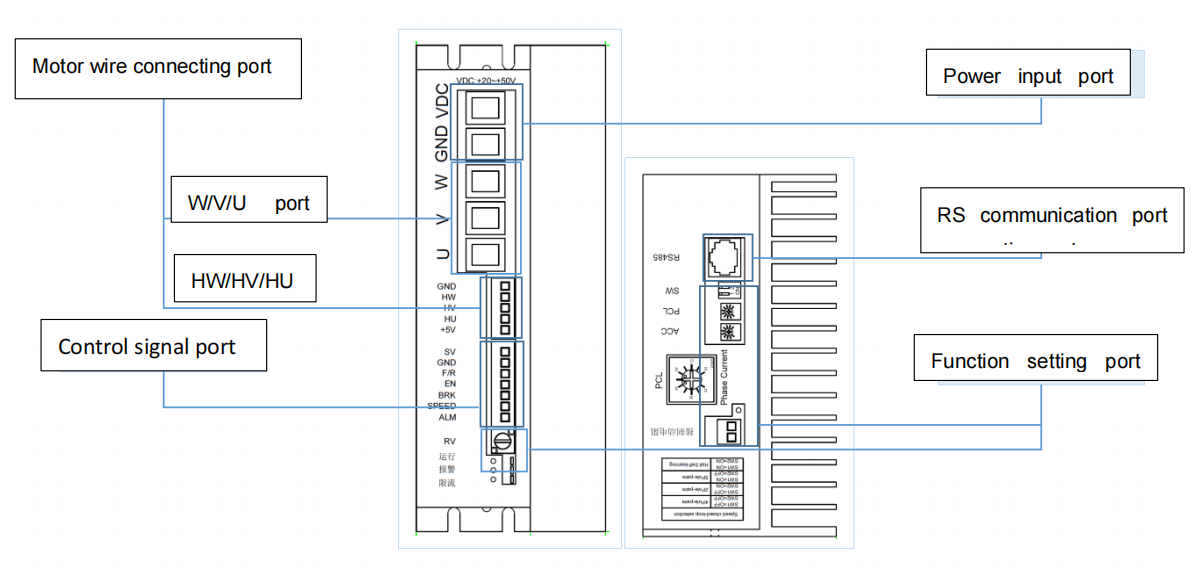
Interface and Wiring
Bldc motor driver circuit diagram
Port signal description
Signal category
Terminal
Functional description
Power connection
VDC
DC Power supply positive electrode
GND
DC Power supply negative electrode
Motor connection
U
Motor line U phase
V
Motor line V phase
W
Motor line W phase
Motor Hall signal
+5V
BLDC Hall signal power positive pole
HU
Hall sensor signal HU
HV
Hall sensor signal HV
HW
Hall sensor signal HW
GND
BLDC Hall signal power negative electrode
Control signal
SV
External speed setting signal input terminal;
EN
Motor stop signal port: When EN and GND disconnect, motor stops slowly while when they connect, motor runs.
F/R
Motor direction control terminal: F/R and GND disconnect, motor will rotate clockwise, and otherwise, motor will rotate anticlockwise.
BRK
Motor brake stop control port; when BRK and GND disconnect, motor run, otherwise, the motor stop
GND
Control signal grounding screw (common port)
Output signal (connect
Pull up resistance
2K-20K )
SPEED
Pulse frequency output corresponded with running speed. Speed can be figured out according N(rpm)= (F/P)×10
F:Output pulse frequency(Hz);P:Motor pole pairs;N:Motor speed
For example: Motor has 4 pole pairs
F=500Hz
N(rpm)=(500/4)×10=1250
ALM
Alarm signal output port. When fault occurs, the voltage changes to 0V from 5V.
Built in control signal
ACC
Acceleration and deceleration time adjustment (Factory default minimum)
PCL
Phase line current limit adjustment (Factory default maximum)
SW
Pole pairs selection and self-learn(Factory default SW1=OFF,SW2=OFF)
Connected to braking resistance
Brake resistance connection port
RS485
MODBUS communication connection
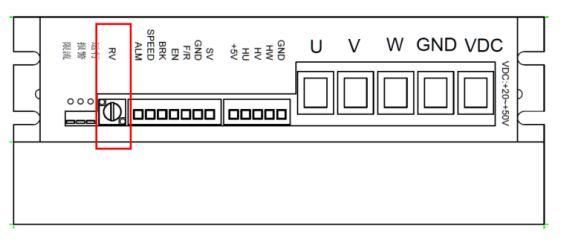
RV
Built in potentiometer speed regulation
Fan
Two built-in fans are temperature controlled fans (starting temperature 70 C)
Speed regulation
Bld-1500RA have speed control methods as following.
1 Via built-in potentiometer
Motor speed is increase when RV knobs is rotated clockwise, when anticlockwise, motor speed decreases. If user use other speed modes, RV should be rotated anticlockwise to limit position.
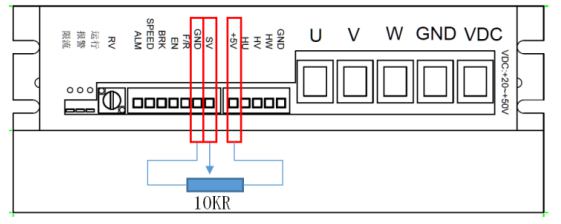
2 Via external potentiometer
Use a suitable potentiometer with a resistance value of 10kR; When connect external potentiometer, the middle terminal connects to SV, the other two terminals connect to +5V and GND
① RV should be rotated anticlockwise to limit position.
② Notice the connection sequence of the potentiometer.
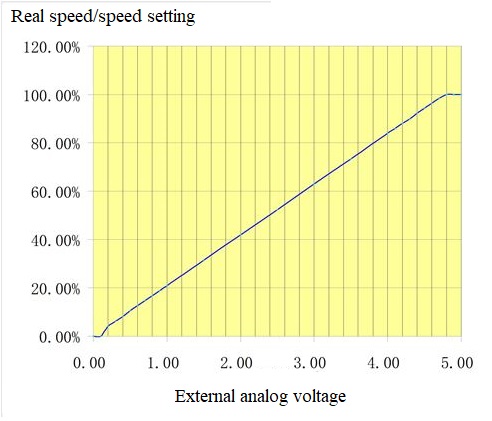
3 Via external analog signal 0-5V
When use external analog signal, the built-in potentiometer RV must be OFF (RV should be rotated anticlockwise to limit position). Be sure to select the correct number of poles.
External analog speed control linearity test curve as below
4 Communication signal RS485
The communication function of the driver adopts Modbus protocol and conforms to the national standard GB / T 19582.1-2008. The two-wire serial link communication based on RS485 is used. The physical interface adopts RJ45. Three wires need to be connected:,B, A and GND (wiring is prohibited for other terminals in this RJ45 interface). The communication address is set through communication. The 120 Ω terminal matches the resistance and needs to be externally connected by the user.