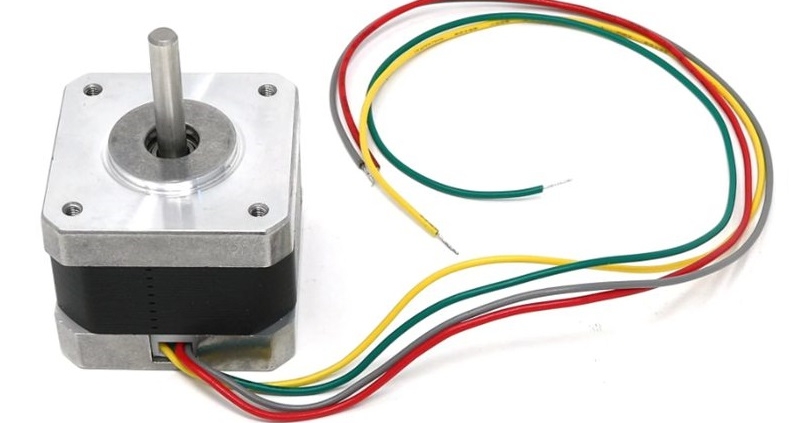
How to Solve the Inaccurate Positioning of Stepper Motors?
Stepper motors play a critical role in automation control systems, but when it works, we may encounter issues of inaccurate positioning. This phenomenon can manifest as cumulative deviations, skipped steps, or misactions. In this article, we will explore common problems causing inaccurate positioning and their solutions.
1.Losing pulses when changing direction results in accumulated deviation with more direction changes.
Stepper drivers usually have specific requirements for direction and pulse signals. Failing to meet these requirements may cause the motor to rotate in the opposite direction to the intended one. To resolve this, adjustments can be made using software to alter pulse logic or introduce delays.
2.High initial speed and acceleration may lead to step losses.
To prevent step losses, it is crucial to avoid excessively high initial speeds, especially with heavier loads. Recommended initial speeds should be kept below 1 revolution per second. Additionally, a pause should be inserted between motor’s forward and reverse rotations to avoid overshooting due to excessive reverse acceleration.
3.Software compensation in synchronous belt applications may be excessive or insufficient.
In synchronous belt applications, the belt’s elasticity can significantly impact motor motion, especially when changing directions. Proper compensation is vital to minimize positioning errors. Adjusting compensation parameters based on the actual scenario and belt characteristics is key to achieving accurate positioning.
The key to solving this problem is to adjust compensation parameters based on the actual scenario and characteristics of the synchronous belt. Applying appropriate compensation when changing direction can offset the elastic deformation of the synchronous belt and reduce positioning errors. Different application scenarios may require varying compensation values, so it is necessary to conduct experiments and tests to find the optimal parameter settings.
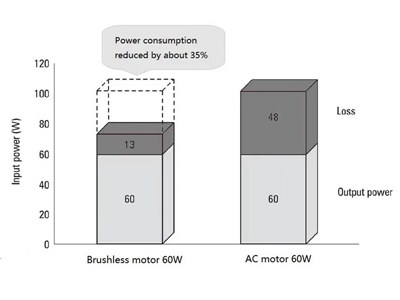
4.Insufficient motor power.
Increasing motor current and drive voltage (while considering suitable driver selection) or choosing a motor with higher torque can address this issue.
5.Controller or driver interference causing misactions.
Reducing interference from external sources and enhancing self-interference resistance are crucial. Common measures are as below:
A.Use double-braided shielded cables to separate signal lines from high-current or high-voltage wires.
B.Implement power filters to remove interference from the grid.
C.Employ optocouplers for signal transmission between devices.
In conclusion, resolving issues of inaccurate positioning in stepper motors requires precise adjustments of direction and pulse signals, setting appropriate initial speed and acceleration, compensating for synchronous belt applications, and optimizing motor power. Reducing interference and enhancing interference resistance are equally important for reliable and accurate motor positioning.